




自主化和智能化高度依赖于飞行控制系统,飞控系统作为无人飞行器的控制核心,其可靠性对无人机至关重要,而飞控计算机的故障检测诊断及应急处理是飞控系统可靠性的重要组成部分。现有关于飞行器故障检测及应急处理研究中,集中在特定类型无人机的具体设备机构的研究,关于高空太阳能无人机类型的飞控系统自主故障诊断及应急处理策略方面,系统的研究相对较少。
高空长航时太阳能无人机通常具有大展弦比、气弹形变、低速飞行等特点,需要针对特性制定故障诊断标准;其次,太阳能无人机设备类型庞大复杂,研发成本和难度高,空中计算和通信能力有限,难以实时完成大规模复杂运算的地空信息交互,需要研究飞行任务中的自主决策逻辑。
基于上述分析,针对高空长航时类太阳能无人机,研究团队分析并设计了一种有效的故障诊断策略及应急处理逻辑,通过图1中的处理逻辑实现。
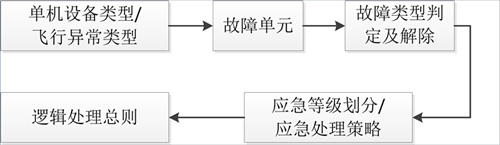
图1 故障诊断及应急处理诊断逻辑
自主故障诊断及应急处理方案设计依据图2完成,重点分为故障单元确定、故障类型划分及故障/解除判定方法、应急等级及处理策略三大部分。
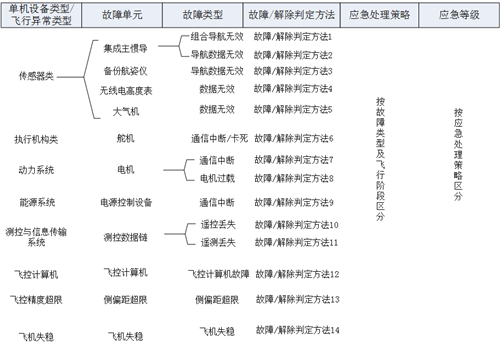
图2 逻辑处理方案流程图
故障单元确定需要根据太阳能无人机上的设备状态,提取直接影响无人机飞行安全的关重单机设备作为重点的故障监测单元进行监测,以判定各单元是否工作正常;此外还应关注太阳能无人机的飞行状态是否正常,如是否在沿预定的航线飞行、飞行速度与给定速度是否一致、无人机的飞行姿态是否正常等。相应故障单元可以归纳为飞控精度和无人机稳定性。
对于单机类型故障,当单机能够输出自身工作状态标志时,则根据工作状态标志判定单机是否故障,当无相关工作状态标志输出时,则通过监测其有效数据输出是否正常来判定故障。故障判定的进入及解除应根据飞行阶段、单机通信周期的不同设定合适的帧次或时间门限,遵循“严进严出”原则,避免故障状态频繁切换。
根据故障对无人机平台的影响程度(故障严重程度)不同,将各故障类型划分为I(最严重故障)、II(严重故障)、III(无效故障)应急等级,并执行相应等级下的应急处理策略。而实际飞行过程中,针对可能涉及多故障并发而需要进行应急等级转换的情况,制定了应急判断及逻辑处理应遵循的总体原则,使得应急等级转换确定有序,避免逻辑时序的混乱。
依据上述策略设计半实物仿真验证平台,见图3。
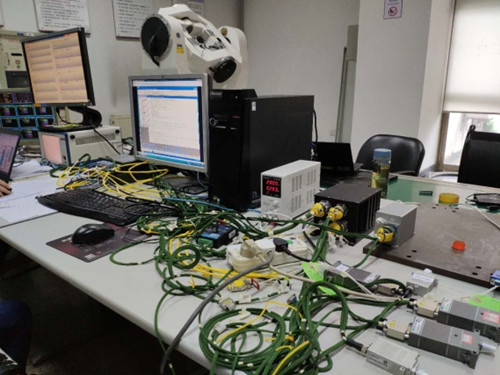
图3 半实物仿真验证平台
仿真过程中在1500s程控模式下的巡航阶段人为断开数据链路,制造遥控丢失故障,根据应急处理策略,飞控模式切换为应急模式(II级应急等级)并进入应急回收阶段,之后自主拉飘着陆,飞行状态自主切换图仿真见图4。
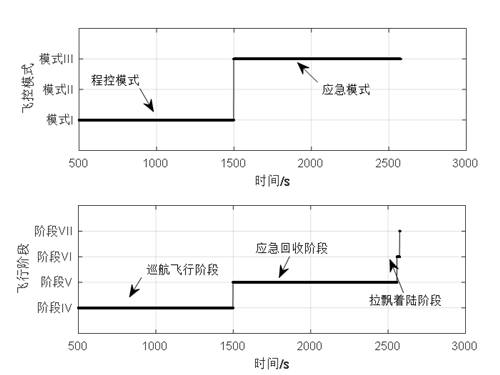
图4 飞行状态自主切换模拟仿真
此种适用于太阳能无人机的自主故障诊断及应急处理策略,基于实际全机设备,从平台级故障层面实施顶层规划设计,提高了无人机在飞行任务中的自主决策能力,此外,所设计逻辑策略实施灵活,即可作为飞控内嵌代码,也可作为独立软件模块被机载软件调用,无需增加硬件成本,具有实际参考意义。