




航空发动机的燃油流量控制精度不断提高,对发动机燃油调节器的控制系统提出了越来越高的要求。由力矩马达驱动的旋转直驱阀(RDDV, Rotate Direct Drive Valve,图1)具有结构简单、抗污染能力强、可靠性高等优势,成为了燃油调节系统计量装置的研究热点。然而由于旋转直驱阀不存在限位结构,同时受到液动力负载的影响,这对系统的精度、稳定性和负载适应性提出了更高的要求。
为了解决上述问题,研究人员采用了位置环+电流环的双闭环控制系统,把位置控制器的输出当作电流控制器的输入,再用电流控制器的输出去控制电机的运转。构建了旋转直驱阀控制系统模型(图2),其中电流环作为内环采用PI控制,其作用是保证电机快速加减速和对电流进行限幅,取较大的比例增益使系统的动态响应快,并通过适当的积分环节保证系统没有稳态误差;为了防止系统中高频电信号的干扰,反馈电路上设有一阶低通滤波器。位置环采用PID控制,并与模糊控制相结合,这样既具有PID控制精度高、稳定性好的优势,又具有模糊控制鲁棒性好、适应性强的特点。以阀芯角位移误差E和误差变化率EC作为输入,以PID控制参数的变化量ΔKP、ΔKI、ΔKD作为输出,采用模糊控制方法对系统进行控制参数的实时整定。选取7个模糊语言值(NB,NM,NS,ZO,PS,PM,PB),作为输入和输出的模糊状态描述,三角形函数在论域范围内灵敏度较高,将其选作NM,NS,ZO,PS,PM等中间模糊状态的隶属度函数。而NB和PB选用高斯形隶属函数,以保证系统两端能够平滑过渡。模糊控制器隶属函数示意图如图3所示。
利用MATLAB/Simulink软件搭建了旋转直驱阀模型,分析了不同控制方法下的响应。图4和图5分别为在阶跃信号和200rad/s的正弦波信号下的输出响应。从图4可以看出,常规的PID控制器、位置/电流双闭环控制器和模糊双闭环PID控制器在阶跃信号下,响应时间分别为0.22 s、0.19 s和0.02 s,并且普通的PID控制会出现较大的超调量,也就是说常规PID控制效果不理想,模糊双闭环控制很大程度上缩短了调节时间,改善控制效果;从图5可以看出,常规PID控制方法出现了明显的超调,并且大幅度的滞后,而模糊PID控制虽然有小幅度的滞后,但是响应速度明显更快,并且没有超调量,其动态跟踪特性明显优于常规PID控制。
通过上述仿真分析可知,模糊双闭环控制能够有效改善旋转直驱阀的位置输出响应,而阀芯的位置输出响应与燃油流量为线性关系,因此,该算法为控制发动机燃油流量提供了一种可靠的控制算法。
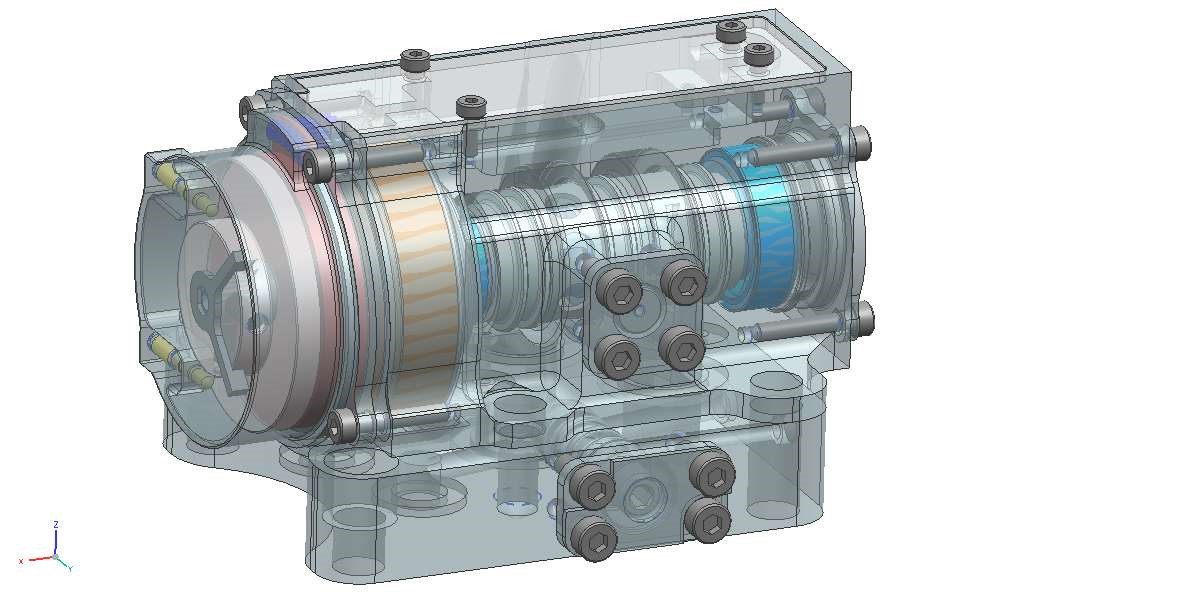
图1 旋转直驱阀结构示意图
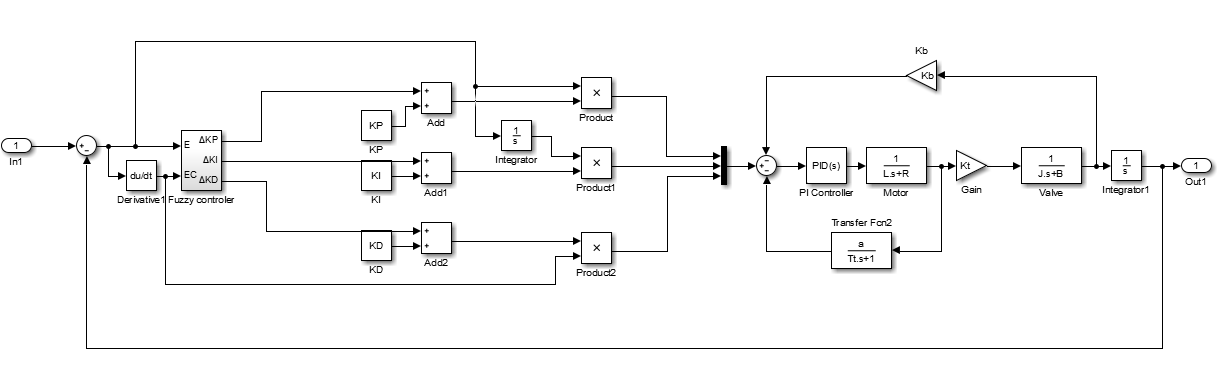
图2 控制系统结构图
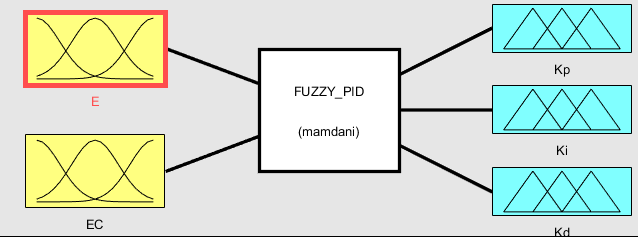
图3 模糊控制器结构
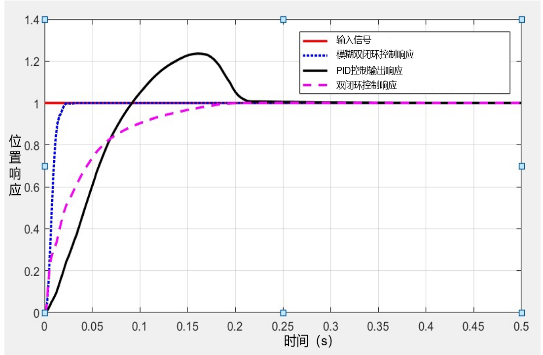
图4 位置阶跃响应

图5 输入200 rad/s时的正弦响应